Mobile ALOHA
Mobile ALOHA is a low-cost and whole-body teleoperation system for data collection,.
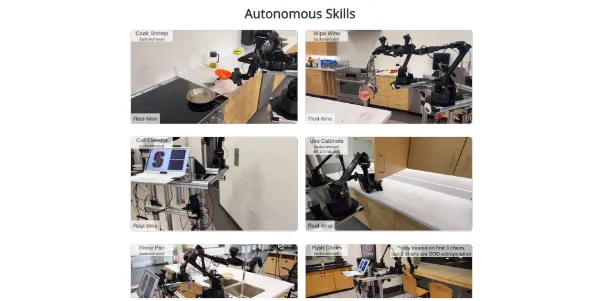
Mobile ALOHA is a low-cost and whole-body teleoperation system for data collection, developed by Zipeng Fu, Tony Z. Zhao, and Chelsea Finn at Stanford. It is designed for imitating mobile manipulation tasks that are bimanual and require whole-body control. Mobile ALOHA augments the ALOHA system with a mobile base and a whole-body teleoperation interface, allowing for the collection of data on complex tasks such as sauteing and serving food, or opening a two-door wall cabinet.
The system uses supervised behavior cloning and co-training with existing static ALOHA datasets to boost performance on mobile manipulation tasks. With 50 demonstrations for each task, co-training can increase success rates by up to 90%, enabling Mobile ALOHA to autonomously complete complex tasks.
Researchers and developers in the field of robotics, particularly those focusing on autonomous mobile manipulation, can greatly benefit from Mobile ALOHA. It provides a low-cost solution for data collection and enables the imitation of complex tasks, making it an invaluable tool for advancing research in this area.
| Tool | Pricing | Upvotes | Rating |
|---|---|---|---|
 Read AI
Read AI |
Freemium | ▲ 112 | ★ 3.7 |
 BigIdeasDB
BigIdeasDB |
Freemium | ▲ 315 | ★ 3.5 |
 Juice AI
Juice AI |
Freemium | ▲ 280 | ★ 4.1 |